¶ ROS2 simulation Cobot
¶ Introduction
The ARCOS-LAB's main research pillar is the Humanoid Robot, with which numerous projects have been developed over the laboratory's active years. The Humanoid Robot is not specifically designed for industry; its purpose is more focused on investigative development. Hence, the idea arose to create a Collaborative Robot aimed at being useful in the production industry market. The Collaborative Robot is developed based on the foundations of the Humanoid Robot. To understand the simulation of both, it is necessary to have fundamental knowledge of ROS2. Therefore, this portal will provide a condensed guide of the steps to follow to carry out the simulation of both the Humanoid Robot and the Collaborative Robot.
¶ ROS 2
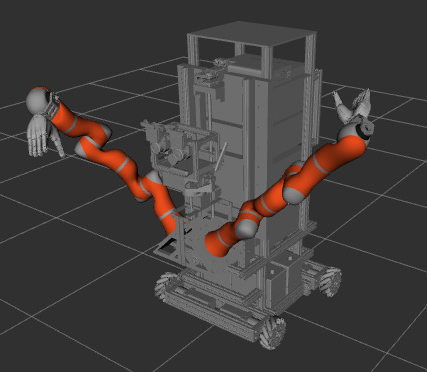
¶ Humanoid Robot
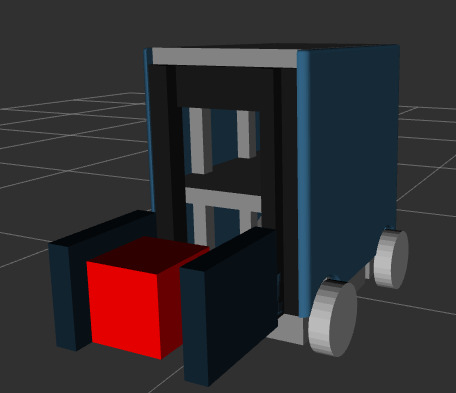
¶ Collaborative Robot