¶ Collaborative Robot
¶ Environment
To simulate, it is crucial to first have ROS 2 properly installed and the environment prepared. If you do not have an environment set up, create a script named ros2_setup.sh. Copy and paste the following code into the script, and place the ros2_setup.sh script in the Home directory on your computer.
source /opt/ros/humble/setup.bash
source /usr/share/colcon_cd/function/colcon_cd.sh
export _colcon_cd_root=~/ros2_install
export ROS_DOMAIN_ID=40
source ~/wsr2/install/setup.bash
cd ~/wsr2
First the installation of ROS2
- Main source: Installation- Ubuntu (Debian)
¶ Repositories
Request access to engineer Carlos Araya Jiménez for the Dexterous Assymetric End Effector repository, clone to the src directory withinwsr2.
git clone git@gitlab.com:arcoslab/masters/2021_2022/carlosaraya/dexterous-assymetric-end-effector.git
Remember: Make sure you have your SSH keys configured in your GitLab account for authentication to work correctly.
¶ Commands
It is important from time to time to apply the following command.
sudo apt upgrade
¶ Terminal 1
Step 1
source ros2_setup.sh
Step 2
colcon build --packages-select dexterous_assymetric_end_effector_sim
¶ Terminal 2
Step 1
cd
Step 2
source ros2_setup.sh
Step 3
rviz2
¶ Terminal 2
Step 1
cd
Step 2
source ros2_setup.sh
Step 3
ros2 launch dexterous_assymetric_end_effector_sim dexterous_assymetric_end_effector_sim.launch.py
¶ Rviz Configuration
Step 1
Fixed Frame - odom
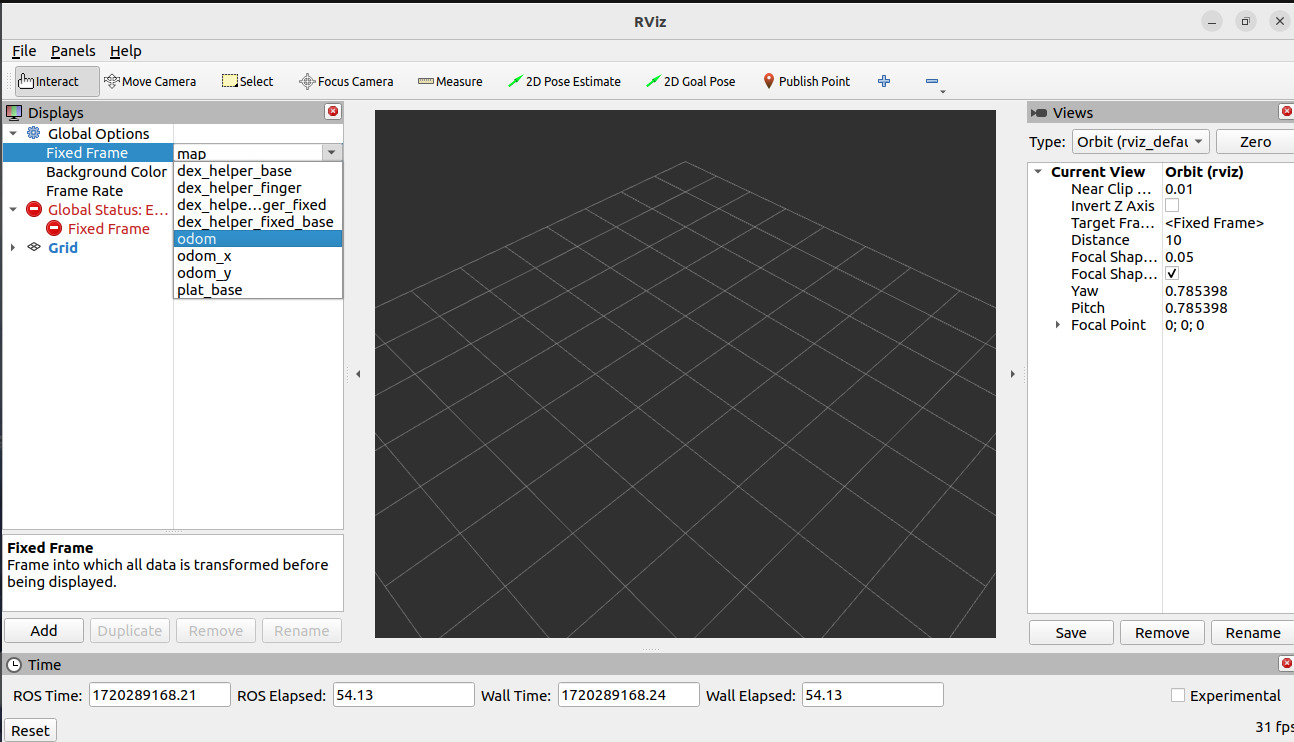
Step 2
Add - RobotModel - OK
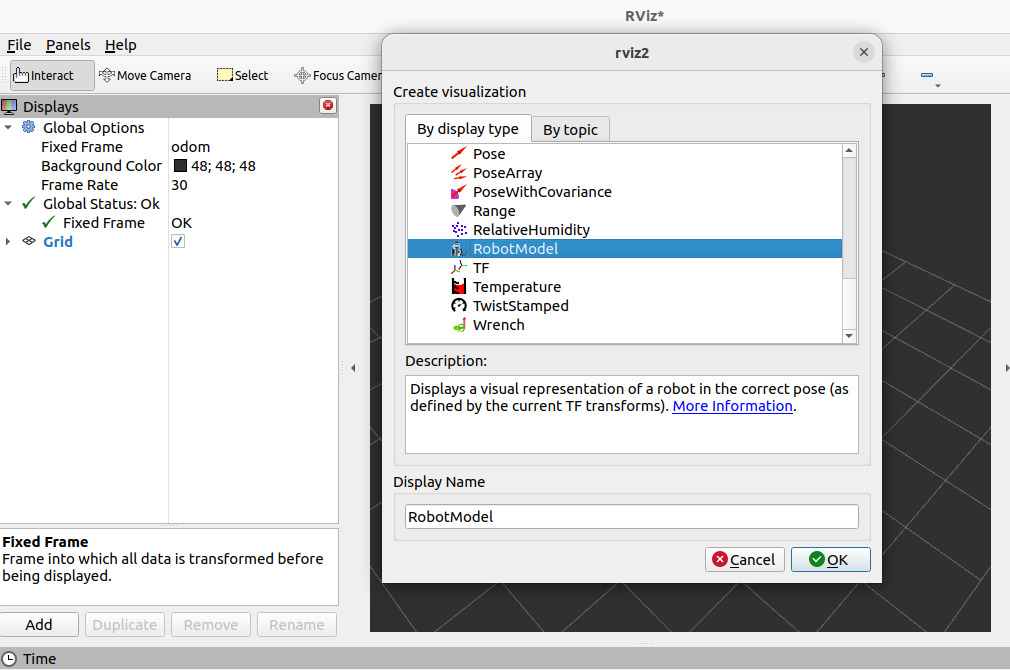
Step 3
Description Topic - /robot_description
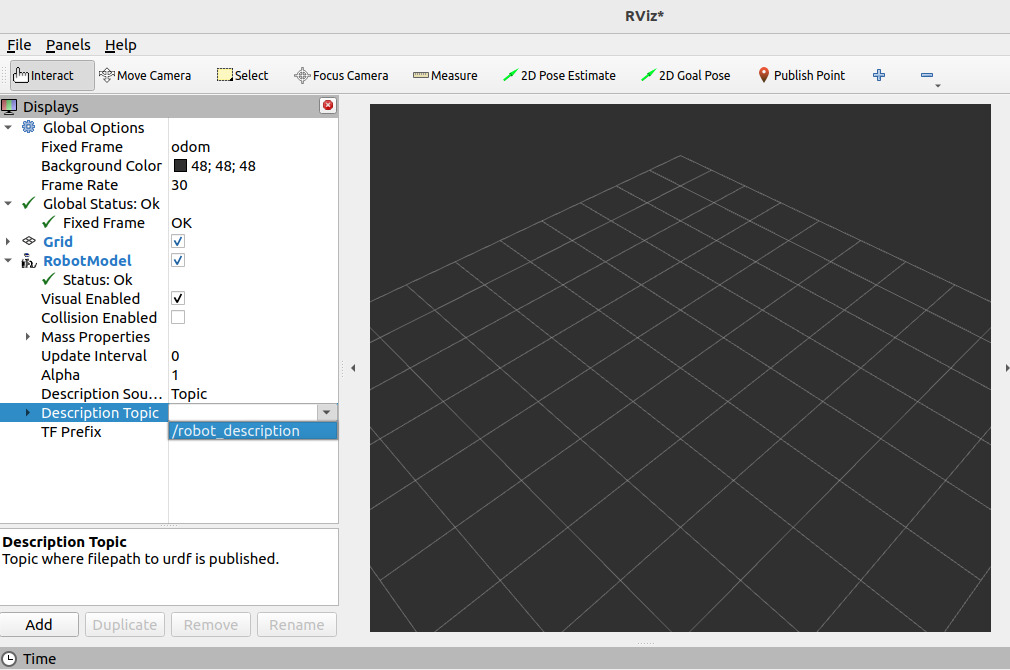
Step 4
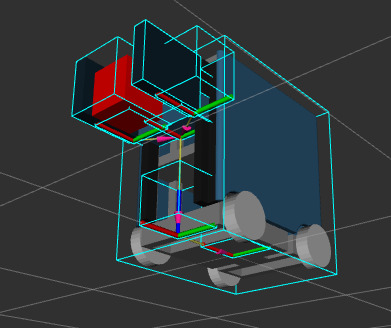
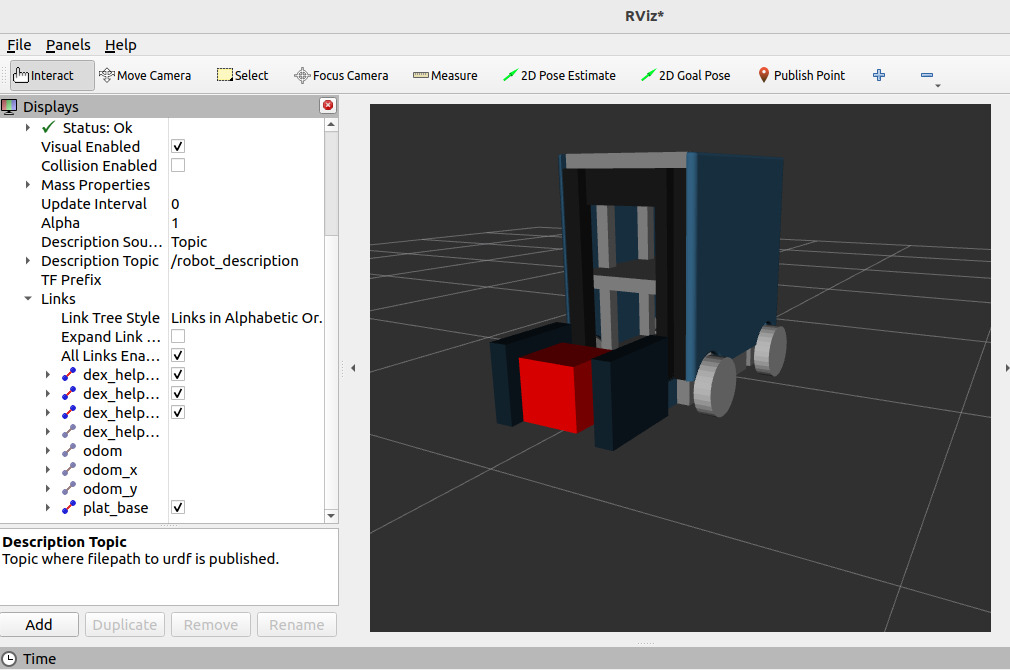
Ready-to-use RViz interface
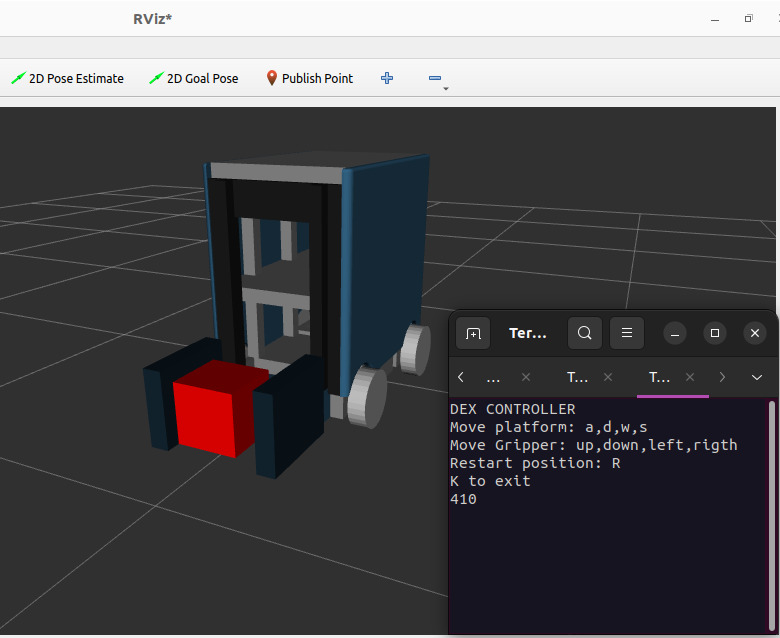
¶ To move collaborative robot
¶ By hand
To move the collaborative robot manually with the send_commands.py script after you have configured the ARviz interface normally, in another terminal:
Step 1
cd
Step 2
source ros2_setup.sh
Step 3
cd /home/<user>/src/dexterous-assymetric-end-effector/dexterous_assymetric_end_effector_sim/dexterous_assymetric_end_effector_sim
Step 4
python3 send_commands.py --ros-args --remap send_commands/command_out:=/test/dexterous_assymetric_end_effector_sim/in
¶ Automated
Create the run_send_commands.sh script on the Home page of your computer, copy the following code and paste it into the run_send_commands.sh script.
#!/bin/bash
# Colcon build
source ~/ros2_setup.sh
colcon build
# Run the Rviz2
gnome-terminal --title="RViz" -- bash -c "source ~/ros2_setup.sh; rviz2; exec bash"
# Run the ROS launch
gnome-terminal --title="Collabot" -- bash -c "source ~/ros2_setup.sh; ros2 launch dexterous_assymetric_end_effector_sim dexterous_assymetric_end_effector_sim.launch.py; exec bash"
# Run the move keyboard
gnome-terminal --title="Move Keyboard" -- bash -c "source ~/ros2_setup.sh; cd /home/angeles/wsr2/src/dexterous-assymetric-end-effector/dexterous_assymetric_end_effector_sim/dexterous_assymetric_end_effector_sim; python3 send_commands.py --ros-args --remap send_commands/command_out:=/test/dexterous_assymetric_end_effector_sim/in; exec bash"
Then open the terminal:
Step 1
cd
Step 2
./run_send_commands.sh
Then configure the RViz interface normally.
Robot with terminal to move it with the keyboard