¶ Usando la mano robótica DLR Hit Hand II
En este tutorial se explica como usar la mano robótica por medio de un cliente de YARP.
¶ Requisitos
- Python 2
- YARP
¶ Estructura de la mano
TODO
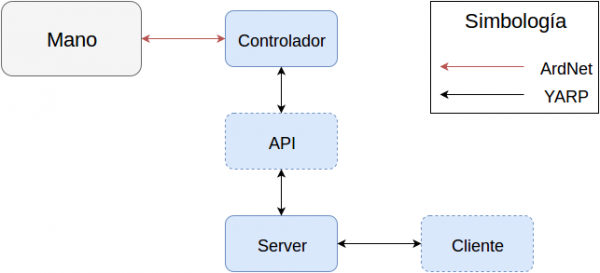
¶ Estructura del código
¶ Cliente de la mano
A continuación está el código fuente para el cliente
Contiene dos archivos: el cliente (hand_client.py) y un programa de ejemplo (client_test.py).
El cliente permite las siguientes funcionalidades:
- Habilitar los dedos de la mano (individual o todos)
- Desabilitar los dedos de la mano (individual)
- Revisar estado de la mano (dedos habilitados solamente)
- Establecer la posición de los dedos (por cada articulación)
- Establecer la rigidez, "amortiguamiento" y velocidad de cada dedo
Para cada una de estas funcionalidades existe una función respectiva.
¶ Ejemplo de uso
A continuación se presenta un código de ejemplo básico para el uso de la mano.
#!/usr/bin/env python
#se importa el cliente de la mano
from hand_client import HandClient
from time import sleep
#se instancia el cliente
hand = HandClient()
#habilitamos el pulgar y el indice
hand.enable(0)
sleep(5)
hand.enable(1)
sleep(5)
#revisamos el estado del pulgar y del indice *
print hand.enabled(hand.fingers["Thumb"])
sleep(5)
print hand.enabled(hand.fingers["Index"])
sleep(5)
#movemos el dedo pulgar
hand.set_pos(hand.fingers["Thumb"], hand.arts["Outer"],60)
sleep(5)
hand.set_pos(hand.fingers["Thumb"], hand.arts["Outer"],0)
sleep(5)
#deshabilitamos los dedos activados
hand.disable(hand.fingers["Thumb"])
sleep(5)
hand.disable(hand.fingers["Index"])
sleep(5)
¶ Uso del ejemplo
- Inicializar un servidor de YARP para la comunicación
$ yarpserver start
- En caso de que el servidor de YARP se encuentre en otra computadora
$ yarpserver start --ip ww.xx.yy.zz
- Correr el ejemplo, suponiendo que en mi directorio actual se encuentre el código de ejemplo
$ ./client_test.py