¶ ROS2 configuration
¶ Setup:
- Make sure you have the following packages:
sudo apt install ros-foxy-control-msgs \
ros-foxy-xacro \
ros-foxy-angles \
ros-foxy-ros2-control \
ros-foxy-realtime-tools \
ros-foxy-control-toolbox \
ros-foxy-moveit \
ros-foxy-ros2-controllers \
ros-foxy-joint-state-publisher \
ros-foxy-joint-state-publisher-gui \
ros-foxy-ament-cmake-clang-format \
python3-colcon-common-extensions
- Create a ROS2 workspace as the one suggested or use the workspace you are currently working on:
mkdir -p ~/franka_ros2_ws/src
- Clone the repo and build the packages:
source /opt/ros/foxy/setup.bash
cd ~/franka_ros2_ws
git clone https://github.com/frankaemika/franka_ros2.git src/franka_ros2
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
source install/setup.sh
¶ Running the example controllers:
This repo comes with a few example controllers located in the franka_example_controllers package. To run those examples you first have to set the Panda in the correct mode:
- First go to https://172.16.0.2 and log in with the credentials if necessary.
- Deactivate the joints' locks:
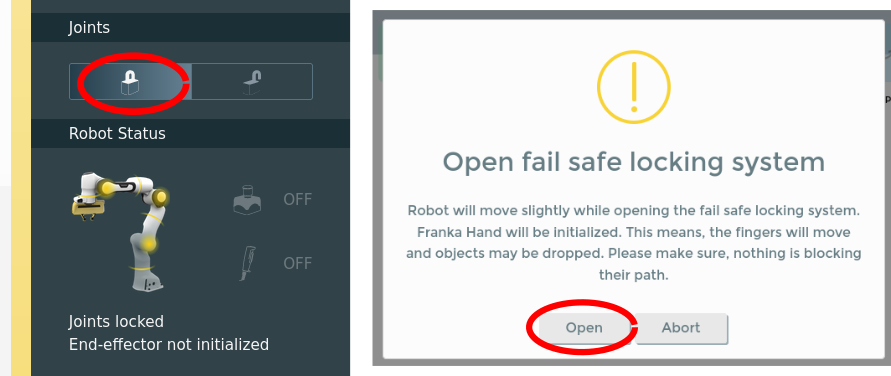
- When the robot's LEDs turn from yellow to white. Deactivate the External activation device:

- Now you can run the following examples.
¶ Move-to-start
This example moves the robot to the home position.
ros2 launch franka_bringup move_to_start_example_controller.launch.py robot_ip:=172.16.0.2
¶ Gravity Compensation
This example sets the robot in gravity compensation mode. It sends zero as torque command to all joints, which means that the robot only compensates the robots original weight.
Warning: The lab's robot may have a camera attached to it and in some positions this controller doesn't compensate it's weight. Be careful and provide the correction needed so that the robot doesn't fall.
ros2 launch franka_bringup gravity_compensation_example_controller.launch.py robot_ip:=172.16.0.2
¶ Joint Impedance Example
The example moves joints 4 and 5 in a periodic movement that is very compliant. You can try to move the joints while it is running.
ros2 launch franka_bringup joint_impedance_example_controller.launch.py robot_ip:=172.16.0.2
¶ Panda Gripper
Use the following launch file to start the gripper:
ros2 launch franka_gripper gripper.launch.py robot_ip:=172.16.0.2
In a different tab you can now perform the homing and send a grasp command.
ros2 action send_goal /panda_gripper/homing franka_msgs/action/Homing {}
ros2 action send_goal -f /panda_gripper/grasp franka_msgs/action/Grasp "{width: 0.0254, speed: 0.03, force: 100}"
To stop the grasping, you can use stop service.
ros2 service call /panda_gripper/stop std_srvs/srv/Trigger {}
¶ Move
ros2 action send_goal -f /panda_gripper/move franka_msgs/action/Move "{width: 0.07, speed: 0.03}"
¶ Turning off the panda:
- Stop the ros program that is running.
- Activate the External activation device.
- Lock the joints.
- Turn off the robot.