¶ Diseño de una tarjeta PCB para captura de fuerzas para los nuevos dedos del robot PANDA
¶ Estudiante:
- Jerónimo Ranck Hurtado
¶ Cronograma:
- Semana 1: Realizar tutoriales de KiCAD
- Semana 1: Hacer las primeras 3 prácticas del curso de microcontroladores
- Semana 2: Estudiar el documento de "checklist" del laboratorio.
- Semana 2: Estudiar el estado del ensamble temporal de captura de datos actual de los dedos de Panda (galgas extensiométricas, puente wheatstone, amplificadores de instrumentación, stm32).
- Semana 3: Construir diagrama de bloques del sistema general que se necesita.
- Semana 3: Estudiar y realizar la selección de todos los componentes de la nueva tarjeta. En particular, de gran importancia será la selección del amplificador de instrumentación que preferiblemente debe tener la característica de ganancia ajustable digital.
- Semana 4,5,6: Realizar diseño esquemático y de la PCB del sistema
- Semana 7: Solicitar la construcción a JLCPCB de la tarjeta y la compra de los componentes
- Semana 9, 10: Ensamble de los componentes de la PCBs
- Semana 11, 12: Realizar pruebas y validaciones. Incluir programas de prueba con STM32: debe probar miniblink/fancyblink, ADC, comunicación USB
- Semana 13: Construir en un wiki que describa el diseño, con las decisiones del mismo, datasheet de la PCB, lista componentes, lugares de compra, etc, etc. (reporte de diseño) (acá es posible hacer en formato IEEE pensando en una publicación).
¶ Bitácora
¶ 1. Primera semana
¶ 1.1. Primera reunión con el profesor Federico Ruiz Ugalde
Fecha: 24/03/2026 Hora: 15:30 – 17:00
Actividad realizada: En esta reunión se discutieron los objetivos, entregables y
alcances del proyecto. Los puntos principales se detallan a continuación.
Objetivo:
Para solucionar el problema de espacio y manejo de cable, el profesor Federico tomó la
decisión de crear un PCB para la recolección de datos de los dedos del robot PANDA.
Dicha PCB debe contener conexiones para cada galga extensiométrica, amplificadores
operacionales, Clk, botón usuario, botón reset y que esté controlado por el
microcontrolador STM32F429I.
Para esto se necesita un estudio de los componentes ya empleados en el robot PANDA,
además de las herramientas de KiCad para el diseño de la PCB.
Por último, se explicaron las inconveniencias del precio para mandar a traer la PCB y
la lista de chequeo para la aprobación del diseño de la PCB.
¶ 1.2. Tutoriales de KiCAD
Fecha: 25/03/2026 Hora: 10:00 – 12:00
Actividad realizada: Se realizaron los tutoriales de KiCAD encontrados en el
Arcos-Lab Wiki para un entendimiento básico de la aplicación.
¶ 1.3. Prácticas del curso de microcontroladores
Fecha: 25/03/2026 Hora: 13:00 – 17:00
Actividad realizada: Se realizaron las primeras 3 prácticas del curso de
microcontroladores encontrados en el Arcos-Lab Wiki.
¶ 2. Segunda semana
¶ 2.1. Estudiar el documento de "checklist" del laboratorio
Fecha: 26/03/2026 Hora: 13:00 – 13:20
Actividad realizada: Descripción de los acuerdos y discusiones de las necesidades
que se requieren para el diseño y construcción correcta de la PCB. La lista de chequeo
fue creada a partir de los problemas típicos encontrados en la creación de PCB.
¶ 2.2. Estudiar el estado de ensamble temporal de captura de datos actual
Fecha: 26/03/2026 Hora: 13:20 – 17:00
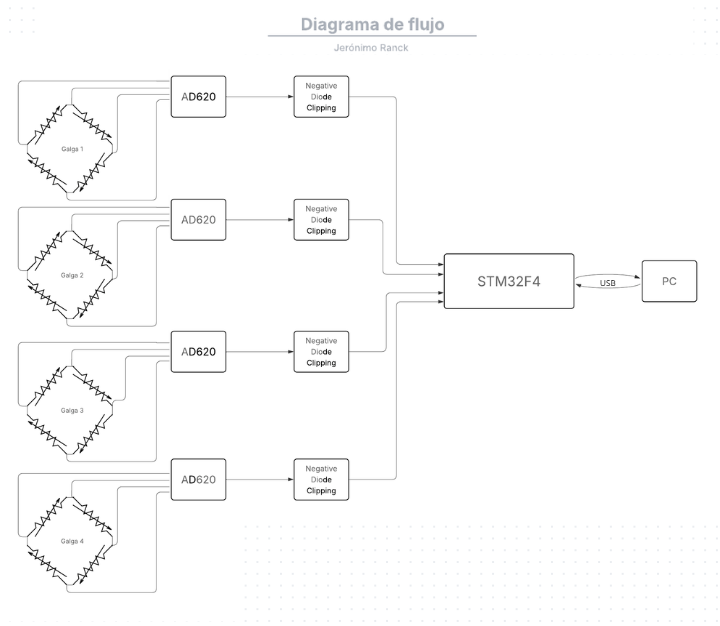
Actividad realizada: Se estudiaron las conexiones para cada galga extensiométrica,
cómo esta entra a los amplificadores operacionales ya que poseen una tensión diferencial
muy baja, cómo este entra a un recortador de onda negativa, recortando la porción
negativa de la onda mediante un diodo y resistencia, y por último es leído por el
microprocesador STM32F429I.
¶ 3. Tercera semana
¶ 3.1. Construir diagrama de bloques del sistema general
Fecha: 2/04/2026 Hora: 12:00 – 17:00
Actividad realizada: Se procedió a construir un diagrama de bloques del circuito
general con los componentes principales que se necesitan para el proyecto.
Además, se discutió la implementación de un clock, la implementación de los botones de
usuario y reset, además de los puertos requeridos para la extracción de datos y la
configuración del microprocesador STM32F429I.
¶ 3.2. Creación de KiCad Skeleton en gitlab y instalación de Linux
Fecha: 9/04/2026 Hora: 13:00 – 17:00
Actividad realizada: Para poder crear el repositorio en gitlab, primero se instaló
Lubuntu Jammy para poder seguir el video tutorial del profesor Federico, ya que este
está hecho para Linux. Siguiendo el tutorial se creó un espacio en el gitlab del
arcoslab donde se puede recopilar la información que se utilizará en el proyecto.
¶ 4. Cuarta semana
¶ 4.1. Reunión para la selección de los Amplificadores operacionales
Fecha: 16/04/2026 Hora: 13:00 – 17:00
Actividad realizada: Se realizó una reunión con el profesor Helber y el profesor
Federico para discutir el cambio de los amplificadores operacionales. Se decidió
implementar amplificadores con ganancia ajustable digitalmente.
¶ 4.2. Búsqueda de Breakout Board para los amplificadores operacionales
Fecha: 23/04/2026 Hora: 14:00 – 17:00
Actividad realizada: Para las pruebas de los amplificadores se requiere un Breakout
Board que cumpla las especificaciones que poseen los amplificadores.
¶ 5. Quinta, Secta, Setima semana
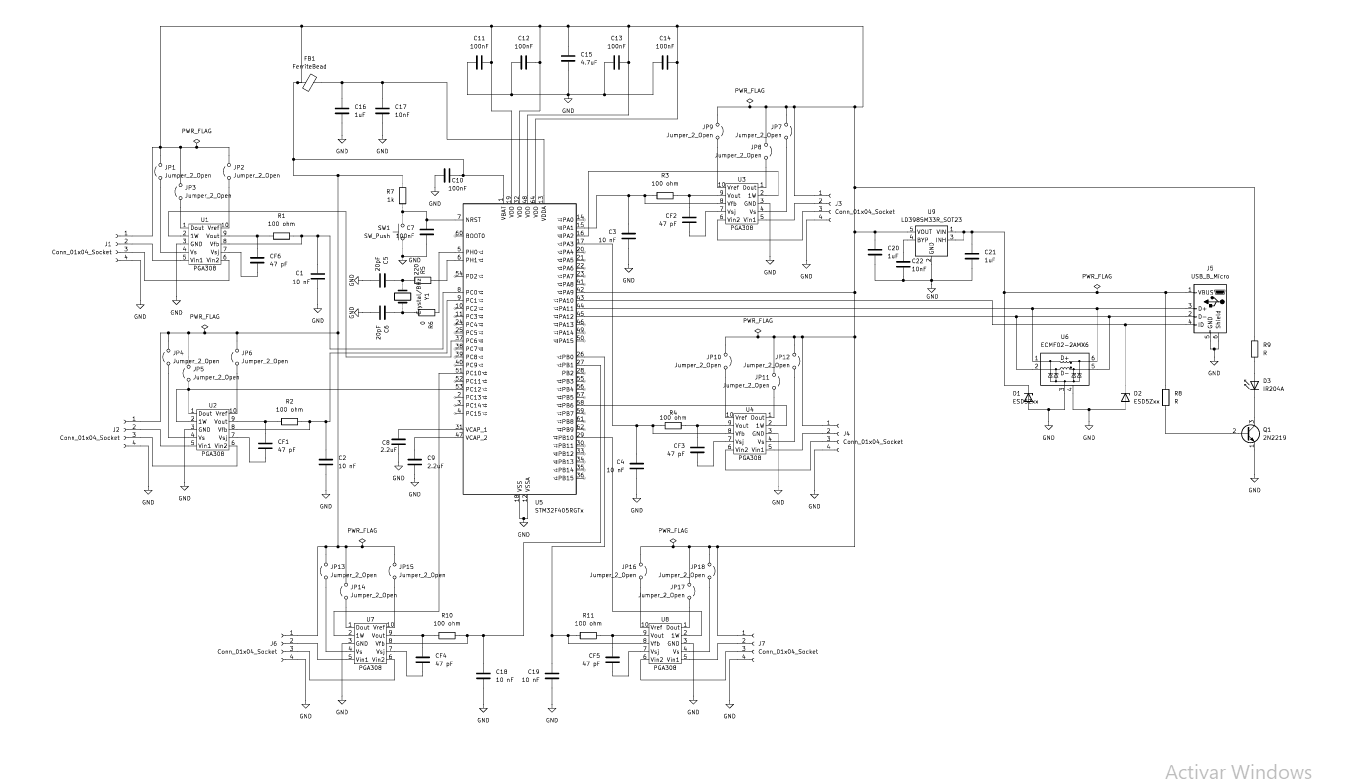
¶ 5.1. Realizar diseño esquemático
Fecha: 25/04/2026 Hora: 12:00 – 17:00
Actividad realizada: Diseño del esquemático de la PCB. Se estudiaron los datasheets tanto del Microcontrolador como de los amplificadores operacionales, tomando de ellos el diseño del clk de 8 MHz, los capacitores de desacople, el diseño del botón reseteo y las configuraciones del puerto USB, y del datasheet de los amplificadores se utilizaron las configuraciones típicas, con jumper que fueron recomendados por el profesor.
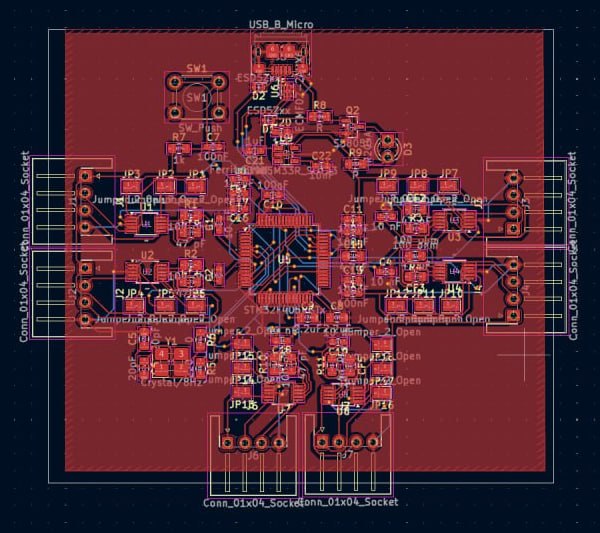
¶ 5.2. Routing y Diseño de la palcas
Fecha: 25/04/2026 Hora: 12:00 – 17:00
Actividad realizada: Para el diseño de las placas, se llevó a cabo usando dos placas, la placa superior en rojo posee las conexiones del USB, el clk, las conexiones de cada amplificador con sus respectivos componentes, conexiones de los capacitores de desacople y el botón de reseteo, además de que se hiso un copper pour que se encuentra conectado al GND para evitar interferencia electromagnética.
La capa inferior en azul presenta las conexiones principales del microcontrolador ya sea conexiones a los conectores de las galgas, conexiones a los amplificadores operacionales, a los capacitores de desacople y a la fuente, además de conexiones secundarios que por razones de espacio no pudieron ser conectadas en la placa superior, todo esto mediante vías en las placas.
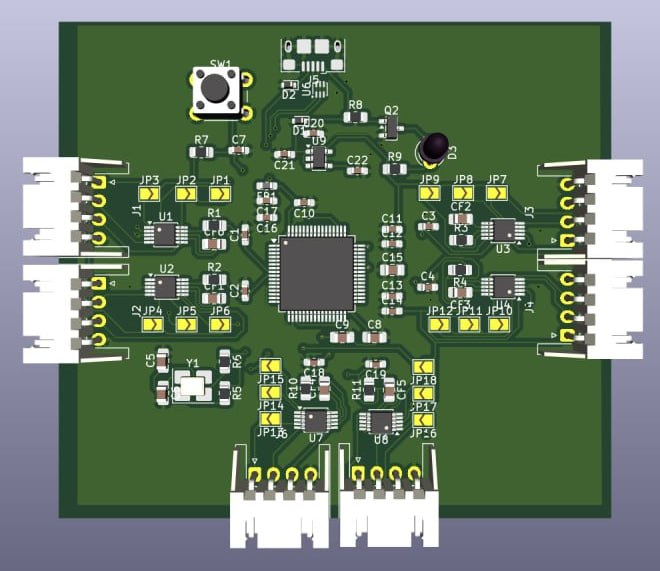
¶ 5.3. Realizar diseño
Fecha: 25/04/2026 Hora: 12:00 – 17:00
Actividad realizada: Se observa el estado final de la placa en la vista 3D para tener una idea del tamaño y las dimensiones de la PCB.
Las dimensiones son: